
Our Rovers

ARES 1

ARES 2

ARES 3

ARES 4

ARES 5

ARES 6
ARES 7
ARES 8
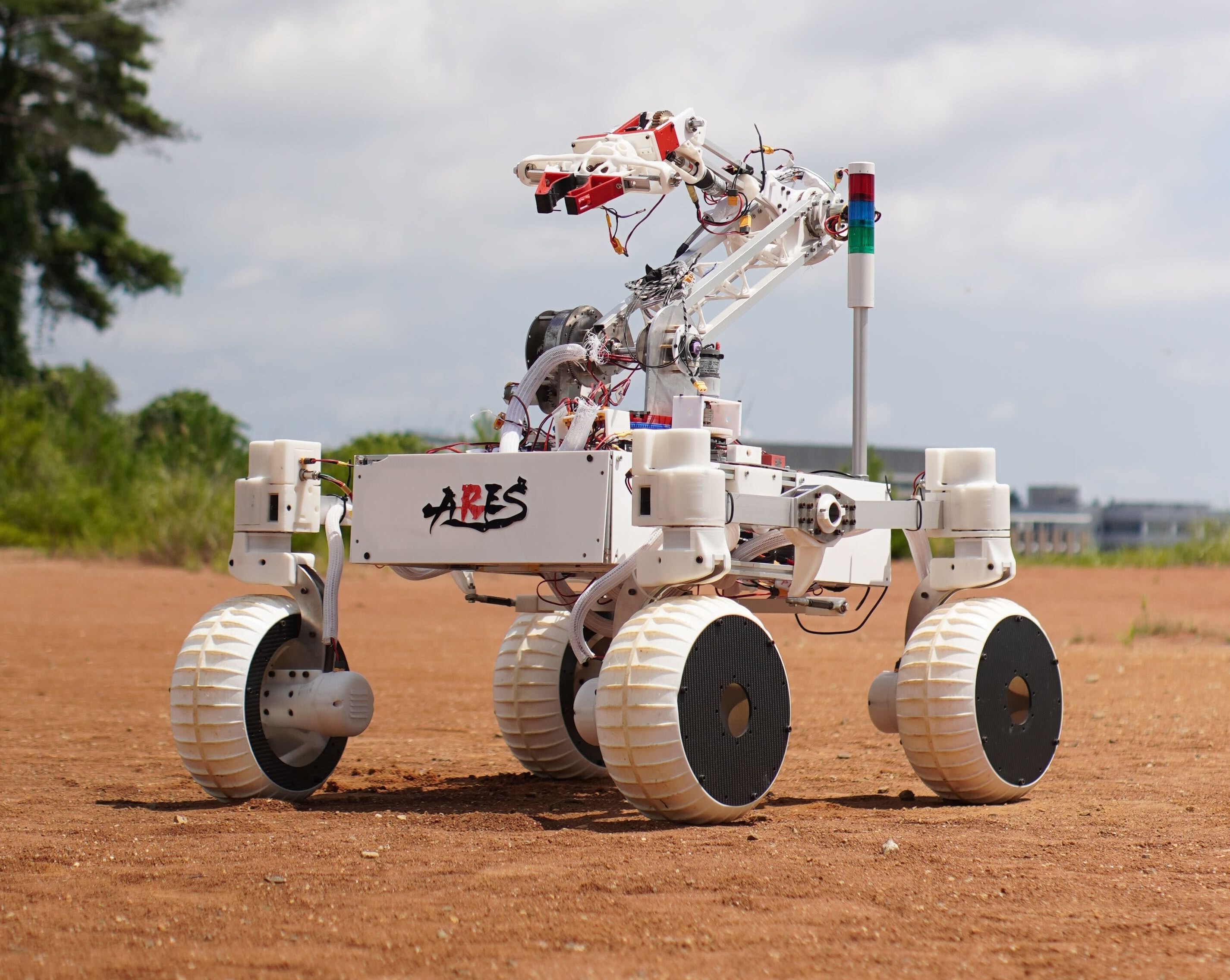
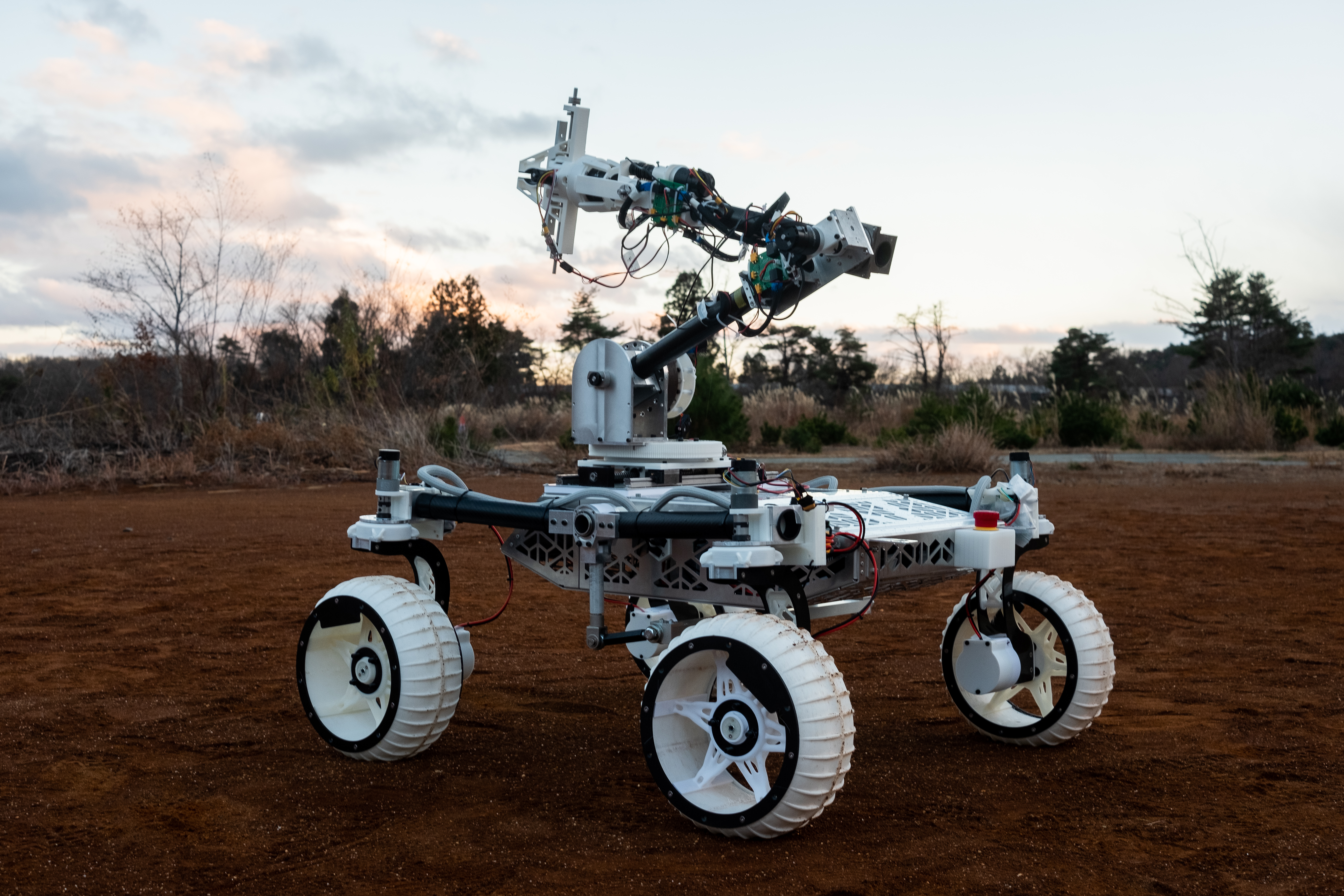
ARES 8
In ARES8, the chassis has been redesigned from a conventional aluminum frame structure to a lightweight yet highly durable aluminum sheet-metal structure. The cutout sections feature traditional Japanese Kumiko patterns, expressing a sense of Japanese identity while also allowing for the attachment of expansion parts, enhancing functionality. In the steering system, parts under high load previously made with 3D-printed materials have been replaced with components made of metal and CFRP, achieving both weight reduction and increased strength. The tires were designed based on literature on terramechanics and optimized for the terrain of the URC competition site, resulting in improved performance. The control system enables meandering driving and is designed for intuitive operation. Moreover, by integrating multiple sensors such as LiDAR and cameras, the rover can autonomously generate paths, enabling advanced autonomous navigation. The arm structure uses carbon tubes to reduce weight and enhance strength, while brushless motors in each joint enable powerful yet precise movements, with a proven capacity to lift up to 8.5 kg. Careful routing of the wiring allows for continuous rotation at the fingertip, and a self-locking mechanism using worm gears prevents joint backdriving under heavy loads—an issue in previous models.